
Den här artikeln är skriven som inspiration för hemmabyggare som funderat på att bygga sig ett eget rotorinterface. Den presenterar inte ett färdigt projekt utan egentligen bara ett knippe idéer som förhoppningsvis kan vara till hjälp för andra. Artikeln utgår ifrån mitt eget projekt som jag hållit på med lite nu och då när jag har haft tid och ork under det senaste året.
![]()
Systemet kan indelas i några olika delar:
- En styrbox. Med informationsruta och möjlighet att köra antennrotorn manuellt.
- En dator med lämplig programvara som räknar ut var satelliterna befinner sig på himlavalvet och skickar den informationen till en styrbox som kontrollerar de enskilda motorerna
- Azimutrotor. I mitt fall en billig synkronrotor som från början saknade riktningsindikator.
- Elevationsrotor. Ett vanligt ställdon som genererar ett okänt, men tillräckligt antal pulser mellan två ändlägen.
Rotorinterface / styrbox
Mitt rotorinterface är uppbyggt runt en Atmega168 8-bitars mikrodator från Atmel. Denna mikrodator valdes för att den är hyfsat billig och för att det finns en prima C-kompilator att hämta hem gratis från nätet. Mikrodatorn styr display och reläer, läser av knapptryckningar och räknar pulser från rotorerna. USB-gränssnittet sköts av krets som heter FT232RL.
Displayen är en 2×20 tecken alphanumerisk OLED display. För att inte några pulser skall gå förlorade finns en 1.0F kondensator som backup och en spänningsdelare som ger signal när matningsspänningen försvinner. Med hjälp av den stora kondensatorn har mikrodatorn lite tid på sig att stänga av rotor-reläerna och spara aktuell position i EEPROM. Idén är lånad från F1TE (se referenslista). Menyknappen tappades bort i hastigheten, den borde egentligen sitta tillsammans med de övriga knapparna.

Schema och layout är gjorda i EAGLE, ett bra program som är freeware för hobbybruk och kan laddas ner från www.cadsoft.de. Ifall någon tycker att detta var något att bygga vidare på finns både schema och layout i orginalformat:
Kortet skickades på tillverkning hos Olimex i Bulgarien.
Det som inte finns på kortet ovan är reläerna och strömförsörjningen. Dessa byggde jag på veroboard för jag ville testa lite olika konstruktioner.

Mjukvaran är skriven i C med kompilatorn avr-gcc som finns både till windows (win-avr), linux och för den händige även för MacOSX. Mjukvaran är i skrivandets stund inte klar och fungerar inte riktigt som den skall, men för den intresserade finns ett ”snapshot” av källkoden att ladda ner [här]. Ta i synnerhet mjukvaran i detta projekt som experimentell, ibland skenar den iväg hej vilt!
För att ladda ner mjukvaran i mikrodatorn behövs en ISP-programmerare av något slag som ansluts på JP1. Om man vill kan man ladda ner en bootloader, t.ex. foodloader. Då kan man i fortsättningen ladda ner ny mjukvara via USB-porten. Jag har gjort en variant av foodloader där bootloadern aktiveras genom att hålla ner meny-knappen när man lägger på strömmen till kretsen. [här]. Fast sedan fick jag tillgång till en AVR-Dragon (hårdvarudebugger) så nu använder jag inte foodloader just för stunden.
USB-kretsen blir en virtuell serieport på datorn och mjukvaran emulerar en AlphaSpid-rotor. Jag valde AlphaSpid för att det a) var det första jag hittade, b) verkade hyfsat enkelt och c) HamRadio Deluxe (mitt favouritprogram) stöder den rotorn direkt.
PC
Datorn som sitter och räknar ut satelliternas position på himlavalvet kör i mitt fall HamRadioDeluxe. Dessutom krävs drivrutiner för kretsen FT232RL som finns att ladda ner från tillverkarens hemsida. Det verkar dock som att drivrutinerna inte är helt felfria, för när jag använder samma krets i mitt hemmagjorda CAT-interface till FT-817 så hänger sig alltid datorn efter ett tag när man kör HamRadioDeluxe.
Azimutrotorn
På pryltorget.net hittade jag en gammal tv-rotor av japansk tillverkning till ett mycket facilt pris. Visserligen är den inte tillräckligt kraftig för några större antenner men den håller sålänge den håller… Dock saknade den en egentlig riktningsindikator så jag monterade in några magneter och en Halleffektswitch så att även denna rotor generar ett godtyckligt antal pulser per 360 grader.
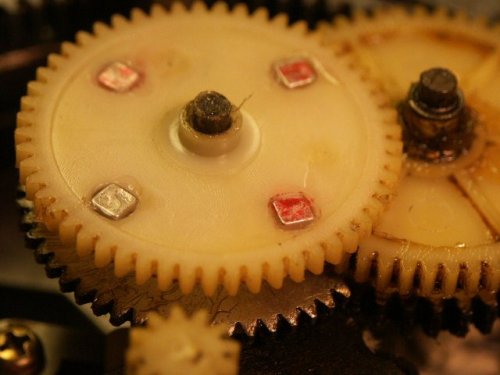
Lämpliga magneter och givare hittades på ELFA. Jag använde A3240 (73-337-19) samt fyra stycken neodymium-magneter (37-522-01). Bäst är det om man klarar sig med en magnet, men i mitt fall rörde sig det lämpliga kugghjulet för långsamt så jag använde fyra.
Det är dessutom att rekommendera att man vänder alla magneter rätt väg innan man limmar fast dom. Sen är det bara att fästa givaren på lämpligt avstånd från magneterna, hitta alla kulorna, skruva ihop och så är det klart.
Elevationsrotorn
Klassiskt ställdon, ”parabolskruv”, för utomhusbruk. Köptes på parabolic.se (notera att denna sida tycks vara allergisk mot Firefox, så använd tillfälligt microsofts webläsare)

Hela paketet byggdes samman med hjälp av ett hyllplan och en skärbräda från IKEA och en 2×2” som svarades till i svärfars garage för att passa i azimutrotorn. Skärbrädan fungerar som glidlager för det 38mm rör (Biltema) som antennerna skall sitta på.
Försök inte sätta upp några monsteryagis med denna konstruktion!
Bara att värma lödkolven!
Inpirationskällor och referenser:
http://www.f1te.org/Tracker/trackeur_gb.htm
http://www.qsl.net/sv1bsx/actuator/actuator.html
http://www.ultimatecharger.com/dish.html